Capable of clearing rock wall, rough terrain, low bar, and portcullis defenses
Most of these capabilities were only used in Ventura, Los Angeles featured no defense clearing autonomous modes
Capable of clearing baseline using encoders to measure distance traveled
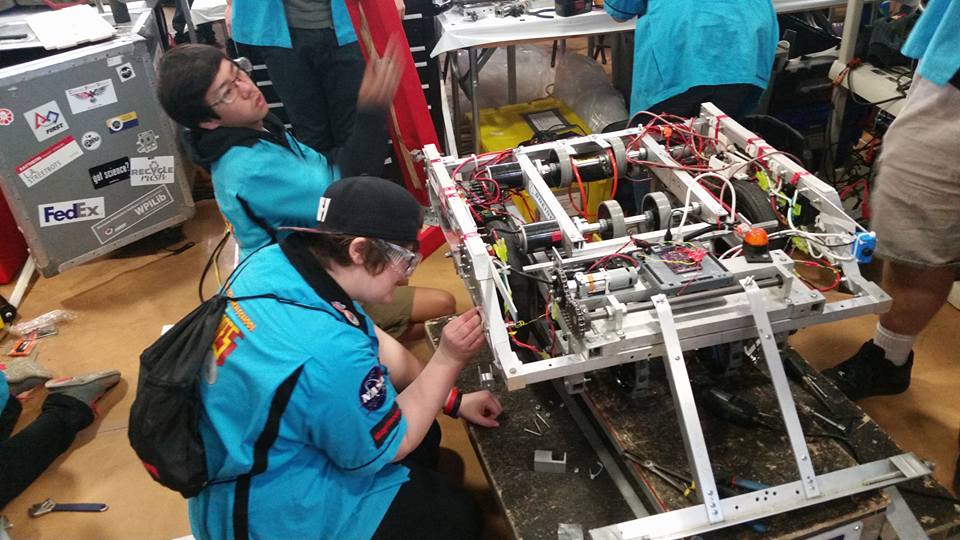
Overview:
Tank drive base
Two active wheels in the middle of the robot with two wheels in the front driven by chain and two rear wheels that were passive to help with defense clearing
Arm mechanism designed to lift up portcullis
Eventually scraped in favor of ramming the portcullis open
Unused: active ball intake system from the back that would allow for top-mounted shooter to fire into high-goal
Shooter had to mounted in the firing position before the match started and could not be angled in any other way. This caused the low bar defense to be unclearable in this position
Programmed in Java
The Pixy saw it’s initial beta debut on this robot. Judges were interested in the prospect, but the tech was too new and far from tested to be debuted live. Pixy was meant to identify where the high goal targets were and move back until the robot was in the correct position to score
LIDAR also saw it’s initial debut on this robot. It was meant to replace the outdated, inaccurate ultrasonic sensor. LIDAR was not ready for prime time until the following year